
イギリスのリーズ大学の科学者チームは、肺を探索し、気管支の最小の裂け目に侵入できる触手を備えたロボットを設計しました。
これにより、今日ではほとんどアクセスできない場所からサンプルを採取したり、化学療法を実施したりすることができます。
近年、医療分野でのロボット工学の出現が大きなニュースをもたらしたことは間違いありません。これはその1つである可能性がありますが、研究の著者がプレスリリースで説明しているように、病院で利用可能になるまでに数年かかるでしょう。
実際には、いくつかの実験段階はまだ来ていません。これまでのところ、彼らは気管支樹の3D図面で触手ロボットを試しただけです。そして、彼らはそれを死体に、そしてそこから生きている患者に使用したいと考えています。
まだまだ多くのステップがあるのは事実ですが、Soft Roboticsで発表された結果によると、これまでの結果はポジティブです。将来的には、がんや他の肺疾患の患者はそれを理解することができます。
肺を越えてアクセスすることは、かつてないほど簡単な作業でした。
今日、医師は気管支鏡と呼ばれる装置を使用して肺と気道を検査しています。鼻や口から挿入して気管支に向ける、直径3.5~4mmのフレキシブルチューブです。
問題は、その大きさによって、気管支を形成する樹木の最も高い部分にしか到達できないことです。最も狭い角度に浸透するために、約2mmの大きさのカテーテルが気管支鏡を通過する。

これはすでに気管支樹の最も薄い枝に導入されている可能性がありますが、外部からの取り扱いは困難です。これは、鼻を通過する別のチューブの内側にあるチューブであることを忘れないでください。つまり、移動の余地はあまりありません。
しかし、リーズ大学のSTORM研究所が開発したカラーロボットは、はるかにアクセスしやすくなっています。結局のところ、それは磁石によって外部から制御される独立した車両です。ボディの外側のサポートには取り付けられていませんが、磁気を使用して目的地まで誘導します。
肺の小さな場所まで移動できる触手を持つロボット
触手ロボットは、気管支鏡に挿入されたカテーテルのように、直径2 mmの一連の相互接続されたシリンダーで構成されています。合計で8 mmの長さですが、それを構成するエラストマー素材のおかげで、非常に柔軟で柔らかいため、各セグメントを実質的に独立して連結できます。
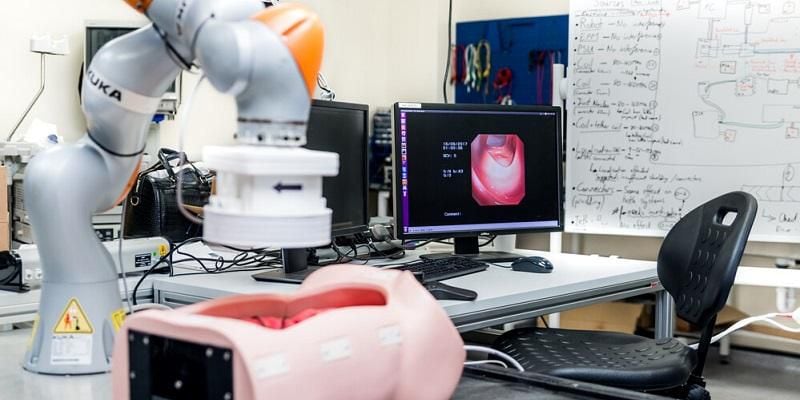
この材料は、外部から操作できる小さな磁性層で覆われています。実際、ロボットアームに取り付けられた磁石が誘導に使用されるため、室内にいるロボットは触手付きのロボットだけではありません。これにより、デバイスは患者ごとに個別にガイドされます。

まず、肺と気管支の一連の画像検査を実施して、薬物のサンプリングまたは投与の正確なポイントを決定します。次に、この重要な情報を使用して、長い移動中にロボットを誘導するように磁石がプログラムされます。
解剖学的データから3Dで印刷された気管支樹を用いて試験を締結した。死体があれば、結果も良いと予想されます。すべてがうまくいけば、数年後には診療所や病院でこの触手ロボットにアクセスできる患者が増えるでしょう。
医療と連携した人工知能とロボット
STORM Laboratoriesは、人体に導入されるデバイスの開発に豊富な経験を持っています。彼の最大の成果の1つは、低コストの内視鏡の発明でした。これは、資源の少ない国の病気の診断に非常に役立つ可能性があります。しかし、テクノロジーが医療のためにできることはそれだけではありません。
一方、人工知能アルゴリズムは病気の診断に非常に役立ちます。たとえば、ディープラーニングを使用して、大量の X 線画像を解析し、疾患に関連する可能性のある病変を検出できます。
また、数百万の分子から薬理学的ポテンシャルのある物質を選別するAIアルゴリズムについてはどうでしょうか。これらも非常に便利ですが、右手に落ちた場合に限ります。
読み続ける
Más Noticias
Christian Nodal y las mujeres con las que ha sido vinculado desde su matrimonio con Ángela Aguilar
Rumores recientes sobre una posible relación con una violinista de su grupo se suman a la lista de escándalos que han mantenido la atención sobre el matrimonio

Municipio cercano a Bogotá celebra este fin de semana el salchipapa fest y festival navideño nocturno
Este festival busca que sus habitantes y los turistas apoyen la economía local mientras disfrutan del alumbrado navideño hasta las 3:00 a.m.

El Tren Lima–Chosica ya no será como se anunció: estos son los cambios clave del proyecto que presentó Rafael López Aliaga
Diez estaciones, una ruta hasta el Callao y viajes de 22 minutos: así era la propuesta inicial de la Municipalidad de Lima, que hoy ha cambiado por completo

Banco Agrario eleva proyecciones sobre la inflación para 2026 pese a una pausa en noviembre
El panorama económico del país para los próximos años fue revisado con nuevos cálculos y perspectivas por una entidad financiera nacional

Atentado terrorista con tatucos, ametralladoras y cilindros bomba al batallón El Juncal en Aguachica, Cesar: seis soldados muertos
Una serie de detonaciones y ráfagas de armas de fuego de alto calibre se registró hacia las 8:00 p. m., generando temor entre los residentes y transeúntes del sector. Reportan heridos
